伺服电机位置控制中的应用
- 2018-11-22 16:10:00
- 陆启蒙 原创
- 9335
0 引言
随着自动化水平的不断提高 , 越来越多的工业控制场合需要精确的位置控制。因此 , 如何更方便、更准确地实现位置控制是工业控制领域内的一个重要问题。位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。 高端的运动控制模块可以对伺服系统进行非常复杂的运动控制。 但在有些需要位置控制的场合 ,其对位置精度的要求比较高 , 但运动的复杂程度不是很高 , 这就没有必要选择那些昂贵的高端运动控制系统。S7 2 200 系列 PLC 是一种体积小、 编程简单、 控制方便的可编程控制器 , 它提供了多种位置控制方式可供用户选择 , 因此 , 如何利用该系列 PLC 实现对伺服电机运动位置较为精准的控制是本文的研究重点 。
1 基本控制系统
伺服系统分为液压伺服系统、 电气 - 液压伺服系统以及电气伺服系统[ 1 ]。本文主要讨论了电气伺服系统中的交流伺服系统 , 其基本组成为交流伺服电机、 编码器和伺服驱动器。 交流伺服系统的工作原理是伺服驱动器发送运动命令 , 驱动伺服电机运动 , 并接收来自编码器的反馈信号 , 然后重新计算伺服电机运动目标位置 , 从而达到精确控制伺服电机运动。
本伺服系统中选用 Exlar 公司生产的 GSX50 2 0601型伺服直线电动缸。 该电动缸由普通伺服电机和一个行星滚珠丝杠组成 , 用来实现将旋转运动转变为直线运动。此外 , 选用 Xenus 公司生产的 XenusTM型伺服驱动器。 它可以利用 RS 2 232 串口通信方式和外部脉冲方式实现位置控制。
一般来说 , 一个伺服系统运转需要配置一个上位机 , 所以本系统采用西门子 S7 2 200 PLC 作为上位机控制器。 通过高速脉冲输出、 EM253 位置控制模块、 自由口通信三种方式控制伺服电机运动。
2 高速脉冲输出模式
西门子 CPU224XP 配置两个内置脉冲发生器 , 它有脉冲串输出 ( PTO) 和脉冲宽度调制输出两种脉冲发生模式可供选择。 这两个脉冲发生器的最大脉冲输出频率为 100 kHz 。在脉冲串输出方式中 , PLC 可生成一个 50% 占空比脉冲串 , 用于步进电机或伺服电机的速度和位置的控制。
2. 1 硬件构成
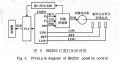
图 1 为高速脉冲输出方式的位置控制原理图。 控制过程中 , 将伺服驱动器工作定义在脉冲 + 方向模式下 ,Q 0. 0 发送脉冲信号 , 控制电机的转速和目标位置 ;Q 0. 1 发送方向信号 , 控制电机的运动方向。伺服电动缸上带有左限位开关 L I M - 、右限位开关 L I M + 以及参考点位置开关REF 。三个限位信号分别连接到 CPU224XP 的 I 0. 0 ~ I 0. 2 三个端子上 , 可通过软件编程 , 实现限位和找寻参考点。
2. 2 程序设计
高速脉冲串输出( PTO ) 可以通过 Step 7 2 M icro /W IN 的位置控制向导进行组态 , 也可通过软件编程实现控制[ 2 ]。 PTO 输出方式没有专门的位置控制指令 ,只有一条脉冲串输出指令 , 而且在脉冲发送过程中不能停止 , 也不能修改参数 。为解决以上问题 , 可以设置脉冲计数值等于10 (或更小) ,并能使脉冲发送指令PLS 处于激活状态 。这样 , 就可以在任一脉冲串发送完之后修改脉冲周期。
图 2 为高速脉冲输出方式位置控制流程图。控制思路为 : 通过 PTO 模式输出 , 可以控制脉冲的周期和个数 ; 通过启用高速计数器 HSC, 对输出脉冲进行实时计数和定位控制 , 以控制伺服电机的运动过程。
3 EM253 位置控制模块
EM253 位置控制模块是西门子 S7 2 200 的特殊功能位置控制模块 , 它能够产生脉冲串用于步进电机与伺服电机的速度和位置的开环控制[ 4]。3. 1 硬件构成如图 3 所示为 EM253 位置控制原理图 , 定义伺服驱动器工作在脉冲 + 方向模式下。 P 0 口发送脉冲 , P 1口发送方向 ,D IS 端硬件使能放大器 , 并同时清除放大器错误 ,L I M - 、 L I M + 、 REF 分别为电机左限位、 右限位以及参考点。
3. 2 程序设计
EM253 位置控制模块可以通过 Step 7 2 M icro /W IN进行向导配置 , 配置完成后系统将自动生成子程序 , 编程简单、可轻松实现手动、自动、轨迹运行模式[ 4 ]。由于EM253 属于开环控制 , 不能很好地反馈电机实际运动情况。因此 , 利用伺服驱动器本身的差分输出信号 , 通过伺服驱动器软件设置 , 反馈给 PLC, 实现闭环位置控制。但由于直线伺服电动缸与 PLC 可允许发送接收信号存在一定差别[5 ], 因此 , 需要对输入到 PLC 的信号进行电平的转化以及降低伺服驱动器发送的反馈脉冲频率。PLC 对输入脉冲进行累加 , 从而得到电机的实际运转位置与运转速度 , 其脉冲计数程序如下。
4 RS 2 232 串口通信方式
4. 1 硬件构成
西门子 CPU224XP 支持无协议通信 , 即用户仅需要对数据格式、传输速率、起始 / 停止码等进行简单设定 , PLC与外部设备间就可进行直接数据发送与接收的一种通信方式[4, 6]。伺服系统和 PLC 分别作为系统的主从站。 PLC控制器通过该通信功能可实现对伺服驱动器进行运行控制、参数读取、伺服驱动器当前运动状态的读取等操作。
当 S7 2 200 系列 PLC 工作在自由口通信模式下时 ,一般通过 CPU 模块的集成接口进行通信。 CPU 集成接口采用了 PPI 硬件规范 , 其接口为 RS 2 485 串口 , 因此 ,当 S7 2 200 系列 PLC 的 CPU 与带有 RS 2 232 标准接口的计算机或伺服驱动器连接时 , 需要配套选用 S7 2 200 PLC的 PC/PPI 转换电缆或一个 RS 2 232/RS 2 485 转换器[ 7 ]。
4. 2 PLC与伺服系统通信
4. 2. 1 报文构成
S7 2 200 PLC 在无协议通信方式工作时 , 不需要任何通信协议 , 通信参数需要根据与其进行通信的伺服驱动器的通信格式进行设定。本伺服系统选用的 Xe 2nus 伺服驱动器可通过 RS 2 232 与 PLC 利用 ASC II 码进行通信 , 其 ASCII 码消息命令格式如下 :
< 命令代码 > < 命令具体参数 > < CR >其中 : < 命令代码 > 为一个单字母代码 ; < 命令具体参数 > 表示电机所要执行的任务 ; < CR > 为一个回车返回字符 , 表示命令结束 。如 : s r0x24 21 < CR > 表示设置伺服控制器工作在可编程控制模式 。
5 三种控制方式的分析比较
上文分别从硬件结构与软件编程等方面 , 详细介绍了三种伺服电机位置控制方式。 为了更好地理解这三种方式的差异 , 我们从软件与控制结果的角度作如下分析比较 。
①软件编程
脉冲串输出方式可以轻松实现一些简单的位置与速度控制 , 具有硬件要求简单、可取代 EM253 并节省系统硬件配置等功能。 但在编写较为复杂的运动程序时( 如绝对运动需要确定电机运动的原点位置) ,由于步骤繁琐 , 故不能采用该方法加以实现。
②控制精度
高速脉冲输出方式和 EM253 位置控制方式均属于开环位置控制 , 它们只负责发送脉冲 , 但当伺服电机或伺服驱动器出现故障时 , PLC 或 EM253 都没得到相应的反馈信息 , 仍然在不断向外发送脉冲 ; 而采用通信控制方式则是在每次发送命令结束时 , 伺服驱动器均会对发送的命令做出应答 。
③位置控制结果
伺服电机的速度等于 PLC 或 EM253 的输出脉冲频率 / 电机每转一圈发送的脉冲数 , 或直接通过 RS 2 232 串口发 送 ASCII 码 控 制。由 于 S7 2 200 系 列 PLC ( 除CPU224XP) 高速脉冲输出口的最高频率为20kHz, EM253的最高输出频率为 200kHz, RS 2 232 串口通信控制方式则是发送 ASCII 码设定运动速度。 因此 , 对于要求高速运动 , 或高控制精度的伺服驱动器系统 , RS 2 232 串口通信控制方式最优 , 而高速脉冲输出方式则不能满足要求。
采用高速脉冲输出控制和 EM253 位置控制方式时 , 伺服驱动器工作在脉冲 + 方向模式下 , 而处于通信控制方式时 , 伺服驱动器工作在可编程位置控制模式下。高速脉冲输出方式不能根据实际状况实时更改伺服电机运动速度与目标位置 , EM253 位置控制方式只能在手动模式下实时更改速度 , 采用通信控制方式时 , 当伺服驱动器设置电机在可编程位置控制模式下运动时 ,可通过 RS 2 232 串口发送 ASCII 码命令 , 实时更改速度和目标位置。
6 结束语
高速脉冲输出方式主要应用于对速度及位置控制精度要求均不高的简单位置控制中 , 从而节省硬件资源 。 EM253 位置控制方式编程简单 , 它支持高速脉冲输出 、支持线性的加减速功能 、提供可组态的测量系统 , 可以使用工程单位如毫米 , 支持绝对 、相对和手动的位控方式 , 提供连续操作 。 RS 2 232 串口通信方式在三种位置控制方式中最具优势 , 它支持闭环控制 , 可实时调节速度 、位置等 ; 但由于伺服驱动器型号的不同 , 所以并不是所有的伺服驱动器都支持串口通信方式 。
在实际应用中 , 将 EM253 位置控制方式应用于注塑机注气系统中 , 经过反复实验 , 可实现手动控制、 半自动控制 、全自动控制等三种控制方式 , 编程简单。触摸屏操作界面简洁、操作灵活、工作可靠稳定。经过详细介绍与分析比较 , 三种位置控制方式各有优缺点 , 各有其自身所适合的应用场合 , 这为今后类似的位置控制提供了一定的参考价值。


- [焊接技术] 螺柱焊机发展史及其焊接工艺 2022-07-11
- [焊接技术] 干了多年的焊工都未必真能说清楚CO2、MIG/MAG和脉冲MIG/MAG的区别! 2020-12-23
- [焊接技术] 温度影响焊接质量,冬天到了应该如何改进? 2020-12-03
- [焊接技术] 螺柱焊中铝制螺钉的焊接工艺 2020-11-13
- [焊接技术] 铝合金焊接中最关键基础知识,一定要知道! 2020-11-12
- [焊接技术] 铝合金氩弧焊缺陷及防止措施,果断收藏! 2020-11-07






- GBT 19867.4-2008 激光焊接工艺规程.pdf 2019-12-25
- GBT 2652-2008 焊缝及熔敷金属拉伸试验方法.pdf 2019-12-25
- GBT 16672-1996 焊缝-工作位置-倾角和转角的定义.pdf 2019-12-25
- GBT 16745-1997 金属覆盖层产品钎焊性的标准试验方法.pdf 2019-12-25
- GBT 17853-1999 不锈钢药芯焊丝.pdf 2019-12-25
- GBT 15169-1994 钢熔化焊手焊工资格考核方法.pdf 2019-12-25
- GBT 15579.5-2005 弧焊设备安全要求 第5部分 送丝装置.pdf 2019-12-25
- GBT 15579.7-2005 弧焊设备安全要求第7部分:焊炬(枪).pdf 2019-12-23
| 联系人: | 韩玉琦 |
|---|---|
| 电话: | 0755-26013200/26013464 |
| 传真: | 0755-26013188 |
| Email: | saw@sawchina.cn |
| QQ: | 2280915288 |
| 微信: | 18682260315 |
| 旺旺: | szhbkj |
| 地址: | 深圳市宝安区石岩街道塘头大道58号 |