智哥机器人项目研发第七阶段工作圆满收官
- 2018-08-13 13:07:00
- 陆启蒙
- 原创 8508
2018年8月9日,深圳市鸿栢科技实业有限公司“智哥机器人项目”研发工作第7阶段工作汇报在公司会议室圆满结束。
“智哥机器人项目”的硬件、软件全部由研发团队自行开发,历时近4年。系统由具有完全自主知识产权的“机器人控制器”、“专用伺服驱动器”、“专用伺服电机”三大部分组成。
“机器人控制器”由基于ARM-A8的“示教编程器”、“解释执行器”、基于双精度浮点DSP的“运动控制器”、基于FPGA的“数据分发系统”四大部分组成,开发出了HBR鸿栢机器人控制语言。
“专用伺服驱动器”由基于FPGA + DSP的硬件结构、8轴集中控制,采用光纤与“机器人控制器”进行数据直连。
“专用伺服电机”由鸿栢科技自行开发,已经在小负载机器人上进行试用,效果良好。
目前由公司自主开发的机器人控制器系统在12公斤、20公斤、50公斤、165公斤机器人本体上运行良好。整过项目进展达到预期效果。



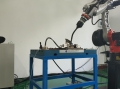
智哥机器人控制系统在165KG的机器人本体进行点焊机焊接演示
智哥机器人项目研发第八阶段工作任务将主要集中在以下几个方面:
第一、开发一款驱控一体的小功率控制器,满足20kg以下机器人的需要;
第二、完善50kg--165kg控制器的功能,提高控制器的安全性和稳定性;
第三、增加控制器的离线编程功能,为实现机器人的视觉功能和三维图像处理功能创造条件;
第四、进一步完善机器人弧焊、点焊和螺柱焊控制系统;开发机器人打磨和搬运等运用系统;
第五、做好5kg机器人本体的设计和制造工作;做好165kg机器人本体的前期规划和实际工作。2018年8月9日,深圳市鸿栢科技实业有限公司“智哥机器人项目”研发工作第7阶段工作汇报在公司会议室圆满结束。
“智哥机器人项目”的硬件、软件全部由研发团队自行开发,历时近4年。系统由具有完全自主知识产权的“机器人控制器”、“专用伺服驱动器”、“专用伺服电机”三大部分组成。
“机器人控制器”由基于ARM-A8的“示教编程器”、“解释执行器”、基于双精度浮点DSP的“运动控制器”、基于FPGA的“数据分发系统”四大部分组成,开发出了HBR鸿栢机器人控制语言。
“专用伺服驱动器”由基于FPGA + DSP的硬件结构、8轴集中控制,采用光纤与“机器人控制器”进行数据直连。
“专用伺服电机”由鸿栢科技自行开发,已经在小负载机器人上进行试用,效果良好。
目前由公司自主开发的机器人控制器系统在12公斤、20公斤、50公斤、165公斤机器人本体上运行良好。整过项目进展达到预期效果。
智哥机器人项目研发第八阶段工作任务将主要集中在以下几个方面:
第一、开发一款驱控一体的小功率控制器,满足20kg以下机器人的需要;
第二、完善50kg--165kg控制器的功能,提高控制器的安全性和稳定性;
第三、增加控制器的离线编程功能,为实现机器人的视觉功能和三维图像处理功能创造条件;
第四、进一步完善机器人弧焊、点焊和螺柱焊控制系统;开发机器人打磨和搬运等运用系统;
第五、做好5kg机器人本体的设计和制造工作;做好165kg机器人本体的前期规划和实际工作。









| 联系人: | 韩玉琦 |
|---|---|
| 电话: | 0755-26013200/26013464 |
| 传真: | 0755-26013188 |
| Email: | saw@sawchina.cn |
| QQ: | 2280915288 |
| 微信: | 18682260315 |
| 旺旺: | szhbkj |
| 地址: | 深圳市宝安区石岩街道塘头大道58号 |